BFS
使用场景
针对无权图,给定一个起始点,要求其他点到起始点的最短路径,可以使用BFS(广度优先搜索)算法得出结果。
代码实现和原理分析
给出下面一个图,假设起始点为3
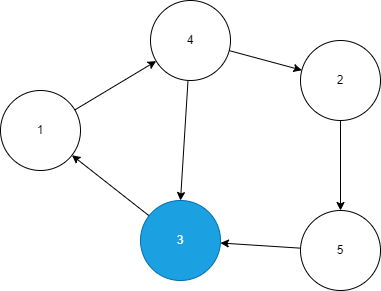
使用distance数组和visited数组分别记录每个点的最短路径和该点是否被访问过。
如需记录最短路径,则需要path数组
1
2
3
| vector<int> distance(n+1, -1);
vector<bool> visited(n+1, false);
vector<int> path(n+1, -1);
|
对于起始点,其distance[start]应该初始化为0, visited[start]初始化为true
1
2
| distance[start] = 0;
visited[start] = true;
|
开始广度优先搜索,依次标记每个未访问的节点为访问状态,这样做可以保证最短路径的节点,最先被标记, 同时也可以避免成环问题
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
| queue<int> q;
q.push(start);
while (!q.empty()) {
int size = q.size();
while (size--) {
int cur = q.front();
q.pop();
for (auto neighbor : graph[cur]) {
if (!visited[neighbor]) {
distance[neighbor] = distance[cur] + 1;
path[neighbor] = cur;
visited[neighbor] = true;
q.push(neighbor);
}
}
}
}
|
完整代码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
| #include <iostream>
#include <vector>
#include <queue>
using namespace std;
int main() {
vector<vector<int>> graph{ {}, {4}, {5}, {1}, {3, 2}, {3} };
int n = 5;
vector<int> distance(n + 1, -1);
vector<int> path(n + 1, -1);
vector<bool> visited(n + 1, false);
distance[3] = 0;
visited[3] = true;
queue<int> q;
q.push(3);
while (!q.empty()) {
int size = q.size();
while (size--) {
int cur = q.front();
q.pop();
for (auto neighbor : graph[cur]) {
if (!visited[neighbor]) {
distance[neighbor] = distance[cur] + 1;
path[neighbor] = cur;
visited[neighbor] = true;
q.push(neighbor);
}
}
}
}
for (auto i : distance) {
cout << i << ' ';
}
cout << endl;
for (auto i : path) {
cout << i << ' ';
}
return 0;
}
|
时空复杂度分析
因为需要访问所有节点(最坏情况下)所以时间复杂度应该为 O(V+E) n为节点数量
空间复杂度 考虑到distance、visited和path数组的开销 应为O(V)
Dijkstra算法
使用场景
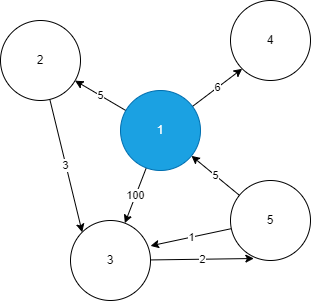
针对有权图,求最短路径问题,这里介绍的是使用堆进行优化的Dijkstra算法,而非暴力的Dijkstra算法
代码实现和原理分析
给出一个有权图,起点为1
Dijkstra算法的具体步骤,可以分为以下几点:
- 创建
distance数组和visited数组,分别用于记录最短路径和该节点是否已被访问,这里的visited,还有另一层含义,即表示该节点的最短路径是否已经确定。
- 初始化
distance和visited数组,设置distance[start] = 0;,同时需注意distance数组中的初始值要尽可能大
- 建立小根堆,将初始节点压入堆中
- 从小根堆中弹出元素
- 如果该节点未访问过 则
visited[cur] = true;
- 如果该节点已访问过 则
continue
- 处理各边
- 如果
!visited[neighbor] && distance[cur] + weight < distance[neighbor],则进行更新,即distance[neighbor] = distance[cur] + weight; q.push(neighbor);
- 其他情况不处理
- 重复第4步骤,直到小根堆为空
具体的代码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
|
vector<vector<vector<int>>> graph{ {{}}, {{2, 5}, {3, 100}, {4, 5}}, {{3, 3}}, {{5, 2}}, {{}}, {{1, 5}, {3, 1}} };
int start = 1, n = 5;
vector<int> distance(n + 1, INT_MAX);
vector<bool> visited(n + 1, false);
distance[start] = 0;
auto cmp = [](vector<int>& a, vector<int>& b) -> bool {
return a[1] > b[1];
};
priority_queue<vector<int>, vector<vector<int>>, decltype(cmp)>q(cmp);
q.push({ start, 0 });
while (!q.empty()) {
vector<int> cur = q.top();
q.pop();
if (visited[cur[0]]) continue;
visited[cur[0]] = true;
for (auto neighbor : graph[cur[0]]) {
if (neighbor.size() > 0 && !visited[neighbor[0]] && cur[1] + neighbor[1] < distance[neighbor[0]]) {
distance[neighbor[0]] = cur[1] + neighbor[1];
q.push({neighbor[0], distance[neighbor[0]]});
}
}
}
for (auto i : distance) {
cout << i << ' ';
}
|
时空复杂度分析
因为要遍历每一条边和每一个节点且要经过堆的调整 所以时间复杂度为 O((V + E) log V)
空间复杂度显然为 O(V)